Human-Robot Interaction
Human-centered robotics at Campus Party Brasil 2012
14/02/12 10:53 Filed in: News
Campus Party Brasil 2012 was a great event devoted to technology and internet with more than 7000 enthusiasts camping in São Paulo. I had the opportunity to give a talk about human-centered robotics. Below are the slides presented on the occasion.
Human-Robot Interaction in the news
09/02/12 16:46 Filed in: News
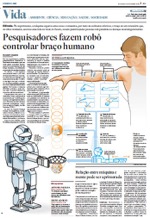
Our work on human-robot interaction presented on IROS 2011 was depicted in the online version of IEEE Spectrum and in the Brazilian newspaper Estado de São Paulo. It was a collaborative work between Bruno V. Adorno, Philippe Fraisse, and myself. Below you may access both articles.

Human-robot colaboration: first tests with HOAP3
05/08/10 12:28 Filed in: Videos
Some results obtained in a human-robot colaboration experiment. All tasks were executed using the cooperative dual task-space framework proposed by Bruno Adorno and Philippe Fraisse. The setup included a HOAP3 humanoid robot, an easyTrack 500 optical tracking system, and real-time visualization.
Towards a cooperative framework for interactive manipulation involving a human and a humanoid
05/04/11 17:26 Filed in: Videos
This is the video accompanying the paper entitled "Towards a Cooperative Framework for Interactive Manipulation Involving a Human and a Humanoid" (ICRA2011).
In the paper, the interaction is represented by means of the relative configuration between the human's and the robot's hands. Based on this principle and a set of mathematical tools also proposed in the paper, a large set of tasks can be represented intuitively. The concept of simultaneous handling using mirrored movements, where the human controls the robot and simultaneously interacts with it by means of a common manipulated object, is also introduced.
In the paper, the interaction is represented by means of the relative configuration between the human's and the robot's hands. Based on this principle and a set of mathematical tools also proposed in the paper, a large set of tasks can be represented intuitively. The concept of simultaneous handling using mirrored movements, where the human controls the robot and simultaneously interacts with it by means of a common manipulated object, is also introduced.
Interactive Manipulation Between a Human and a Humanoid: When Robots Control Human Arm
17/08/11 08:19 Filed in: Videos
This is the video accompanying the paper entitled "Interactive Manipulation Between a Human and a Humanoid: When Robots Control Human Arm" (IROS2011).
In the paper, a novel approach in human/robot collaboration is presented, where the robot controls not only its arm but also the human’s by means of functional electrical stimulation (FES). The video illustrates the method, as well as experimental results in a “ball in the hoop” task using healthy blindfolded subjects.
In the paper, a novel approach in human/robot collaboration is presented, where the robot controls not only its arm but also the human’s by means of functional electrical stimulation (FES). The video illustrates the method, as well as experimental results in a “ball in the hoop” task using healthy blindfolded subjects.
Robot teleoperation using Kinect
30/01/13 19:15 Filed in: Videos
This is the video accompanying the paper entitled "Manipulator control based on the dual quaternion framework for intuitive teleoperation using Kinect" (LARS/SBR 2012). In the paper, Kinect is used to enable robot teleoperation. Since only hand position measurements are available, the operator's left hand is used to set the robot operation mode. Current works involve integrating wireless motion sensors to enable obtaining hand orientation as well.