|
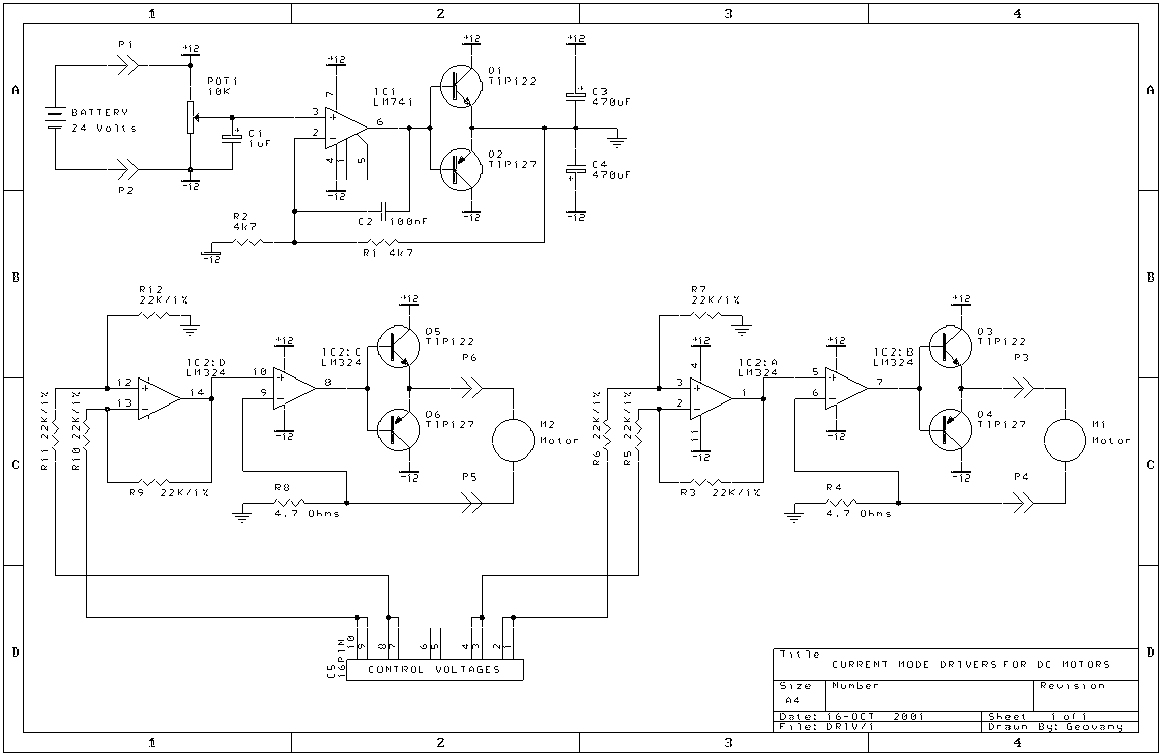
Atuadores fonte de corrente para os motores |
Atualizado em 13/02/2003.
Asterisco é uma plataforma móvel reduzida que pretendo usar para implementar e talvez desenvolver técnicas de navegação autônoma de robôs móveis. Esse é um projeto que realizo em casa nas "horas vagas", tendo no entanto pouco tempo disponível. Pretendo construir assim uma plataforma com as seguintes características:
|
Data
|
Descrição
|
|
29/07/2002
|
Primeira versão de um executivo tempo-real não-preemptivo, objeticando contruir um programa multitarefas para a medida da velocidade das rodas. Modificação no esquema da placa dsp31sbc na parte de interrupções IRQ. |
|
junho
de 2002
|
Retomada do projeto após alguns meses de parada devido ao doutorado. Substituição dos codificadores ópticos das rodas por codificadores mecânicos. Introdução de uma placa protótipo perfurada para a concepção dos circuitos de interface da dsp31sbc. Início da programação da dsp31sbc objetivando um executivo tempo real preemptivo. |
|
11/11/2001
|
O carregador das baterias foi montado e instalado. O circuito de geração de alimentação simétrica para as fontes de corrente dos motores DC foi montado. Primeiros testes realizados. |
|
05/11/2001
|
Circuito
regulador de tensão principal foi montado e testado. Esse circuito
recebe os 24 volts das baterias e gera 9 volts regulados.
|
|
14/10/2001
|
Montagem e teste das fontes de corrente para acionamento dos motores DC. |
|
maio
de 2001
|
Instalação do sistema de tração e de codificadores ópticos na rodas. Os codificadores ópticos foram extraídos de "mouses" de PC. Dificuldade na centragem das rodas perfuradas. O circuito de condicionamento de sinais dos codificadores ópticos também foi montado e testado. |
|
abril
de 2001
|
Construção da armadura usando alumínio. |
|
Atuadores fonte de corrente para os motores |
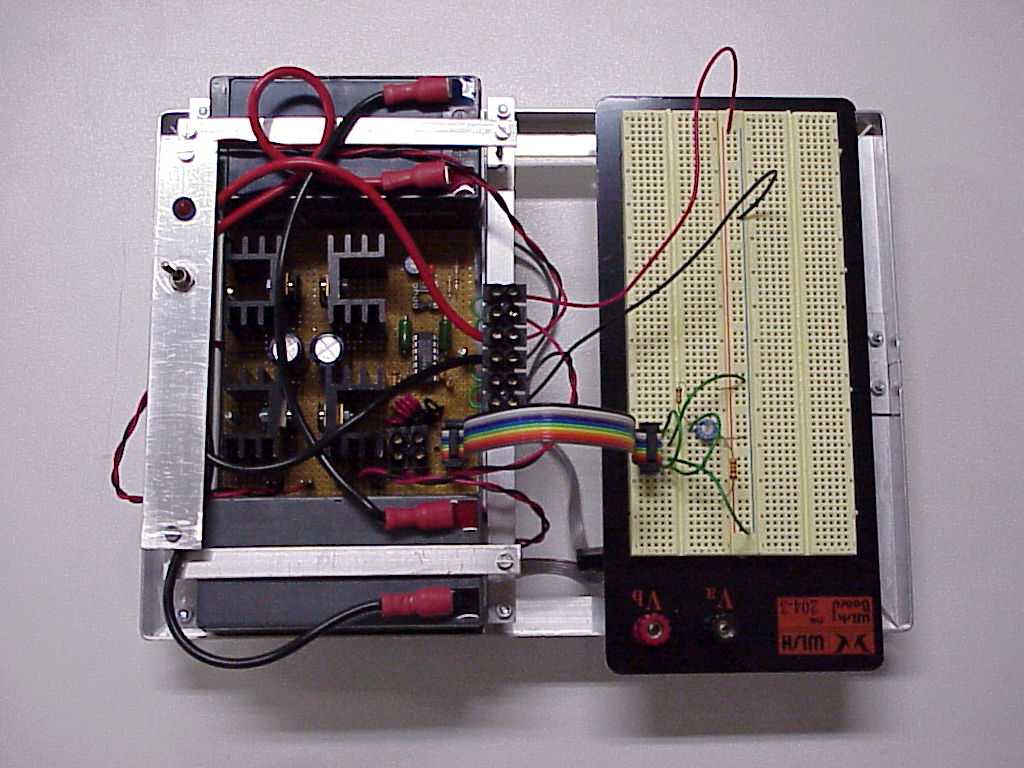
(a) Asterisco: vista de cima. |
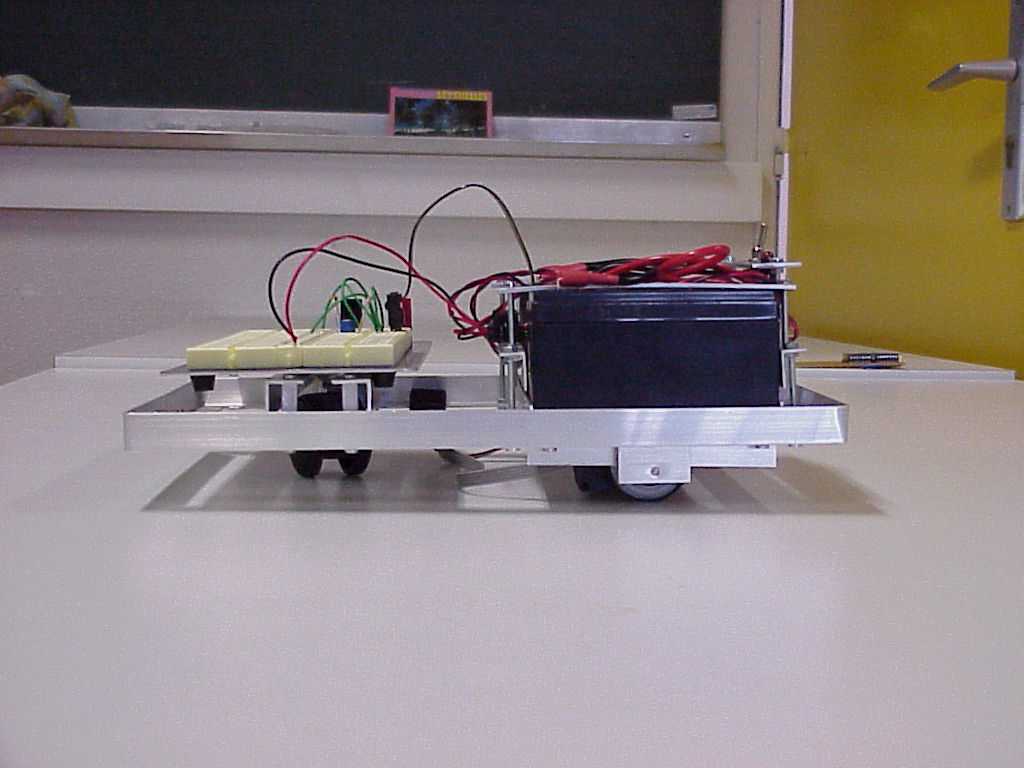
(b) Asterisco: vista de lado. |
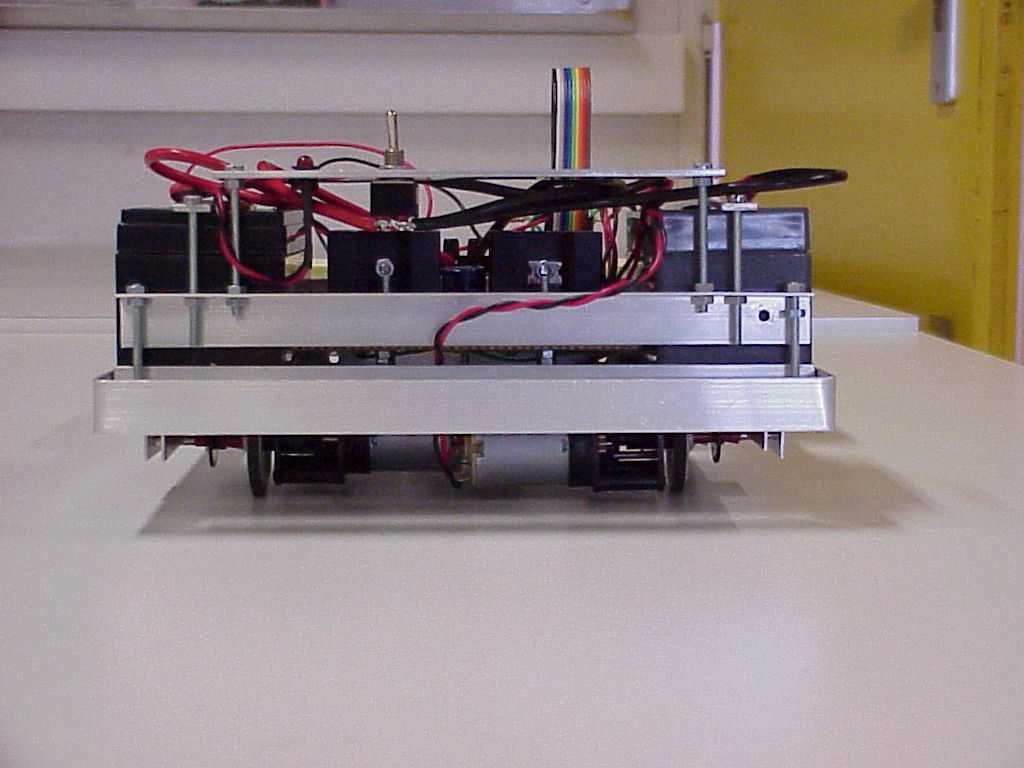
(c) Asterisco: vista de frente. |
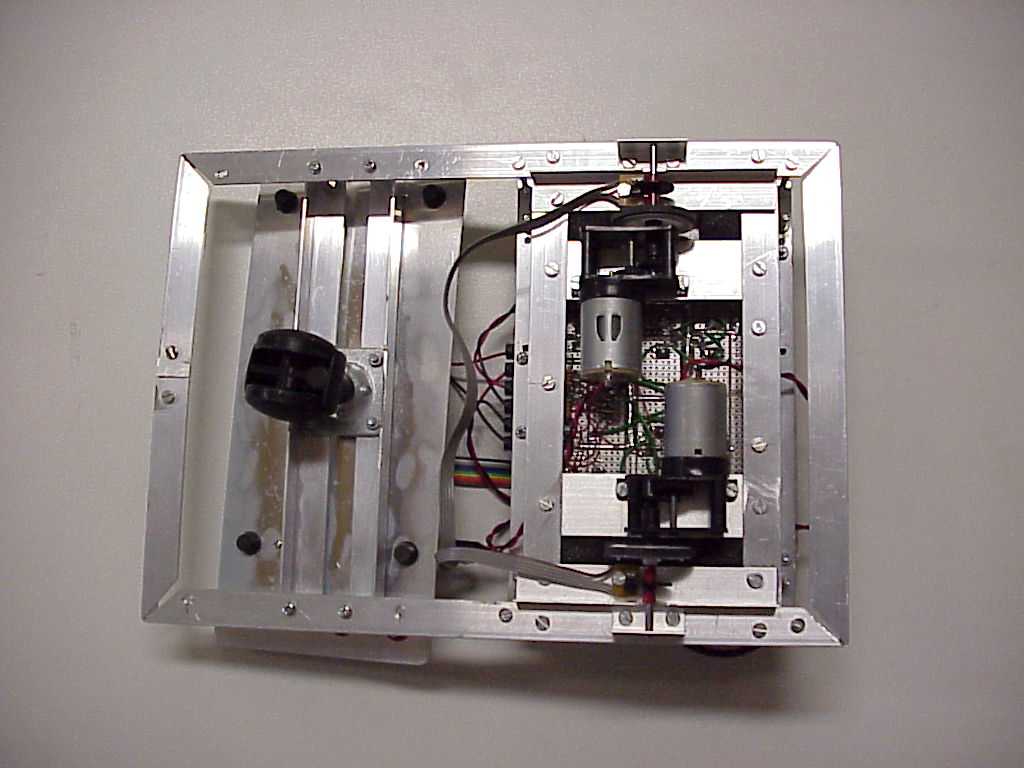
(d) Asterisco: vista de baixo. |
|
Arquivo
|
Descrição
|
|
Os primeiros movimentos de Asterisco. Nesse filme, a corrente nos motores foi mantida constante. Então, sem controle, os motores aceleram até a tensão de acionamento saturar. |