|
|
|
Sistemas
de Controle
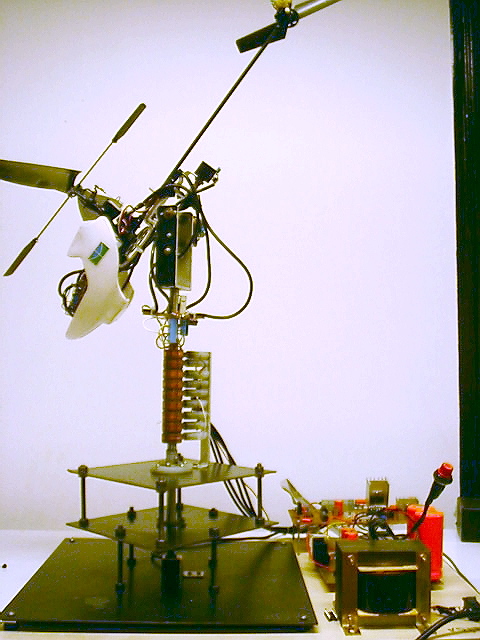
Plataforma
de laboratório para estabilização de
atitude e controle tempo real de helicóptero
elétrico
(período do
projeto: agosto 2003 a junho 2004)
- Equipe:
- Geovany Araújo Borges
- Antônio
Padilha Lanari Bo (graduação Mecatrônica)
- Hélio
Henrique Fonseca Miranda (graduação Mecatrônica).
- Objetivos: Modelagem e controle
de atitude tempo real de um helimodelo montado em um eixo
universal de três graus de liberdade. Interface via
PC para visualização dos dados e a leitura
das referências desejadas através de um joystick.
- Atividades: projeto mecânico
da plataforma, instrumentação eletrônica
e sensoreamento, programação tempo real, interface
microcontrolada, projeto de controle de atitude, identificação
de modelo de predição usando rede neuronal.
- Documentos:
- Antônio Padilha Lanari Bo
e Hélio Henrique Fonseca Miranda, "CONCEPÇÃO
DE UMA PLATAFORMA EXPERIMENTAL PARA ESTUDO DE CONTROLE
DE UM MODELO REDUZIDO DE HELICÓPTERO", Relatório
de trabalho conclusão de curso de graduação
em Eng. Mecatrônica, junho 2004. (PDF).
- Fotos:
- Vídeos:
- Primeiro teste em malha com o
modelo montado sobre a base (WMV)
- Controle do helicóptero
em malha aberta (operador humano) (WMV)
- Controle do helicóptero
em malha fechada (PID) (WMV)
- Controle do helicóptero
em malha fechada (PID) com perturbação
(WMV)
|
|
|