|
|
|
Control
Systems
Laboratory
platform for stabilization and attitude control of an electrical
helicopter
(from august 2003
to june 2004)
- Members:
- Geovany Araújo Borges
- Antônio
Padilha Lanari Bo (B.Sc. student, Mechatronics Eng.)
- Hélio
Henrique Fonseca Miranda (B.Sc. student, Mechatronics
Eng.)
- Goals: Modelling and attitude stabilization
of a low-cost RC helicopter mounted on a 3-D universal joint.
IBM-PC interface for data visualization and attitude reference
through an off the shelf joystick.
- Activities: mechanical
design of the universal joint, electronc intrumentation,
real-time programming, microcontroller interface, atittude
control design, neural-network-based prediction model identification.
- Documents:
- Antônio Padilha Lanari Bo and Hélio Henrique
Fonseca Miranda, "CONCEPÇÃO DE UMA
PLATAFORMA EXPERIMENTAL PARA ESTUDO DE CONTROLE DE UM
MODELO REDUZIDO DE HELICÓPTERO", B.Sc. conclusion
report in Mechatronics Eng., june 2004. (PDF).
(in brazilian portuguese).
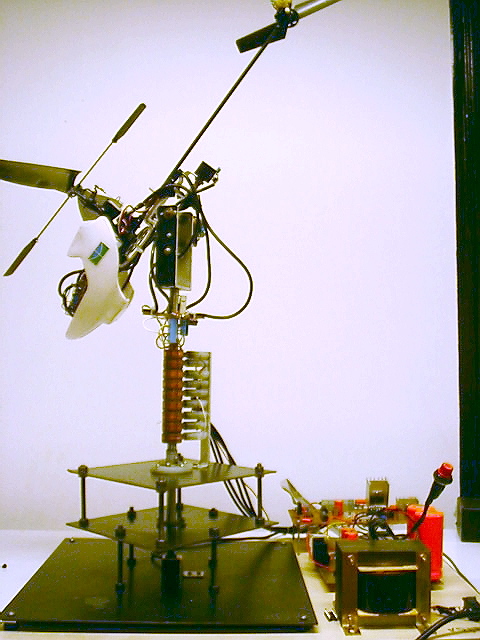
- Photos:
|
Helicopter
and a view of the system
|
|
|
|
- Videos:
- Open loop test (WMV)
- Open loop test with human operators (WMV)
- Closed loop PID control (WMV)
- Closed loop PID control with disturbing (WMV)
|
|
|