Objetivos: Concepção
de um UAV (unmanned aerial vehicle) baseado em helimodelo
podendo ser usado no auxílio a atividades de exploração,
inspeção e segurança. O UAV deve ser
capaz de pousar e aterrisar automaticamente. Deve ser assitido
a distância ou realizar tarefas de rastreamento de
forma autônoma.
Atividades: modelagem
e identificação, síntese de controladores
de velocidade e de posição (altitude e atitude),
desenvolvimento de um sistema de localização
por fusão de dados GPS e INS, desenvolvimento de
um sistema de decolagem e pouso automatizado guiado por
visão, desenvolvimento dos sistemas eletrônicos
embarcados, arquitetura de controle tempo real usando Linux-RTAI,
simulador para avaliação off-line dos sistemas.
Documentos:
Pedro Kouri Paim, "Modelamento, Simulação
e Controle de Veículos Autônomos Aéreos
e Submarinos", Relatório de trabalho conclusão
de curso de graduação em Eng. Mecatrônica,
junho 2005. (PDF).
Co-orientado por Bruno Jouvencel (LIRMM, França).
Fotos:
Controle
de velocidade do rotor principal - Alexandre e Antônio
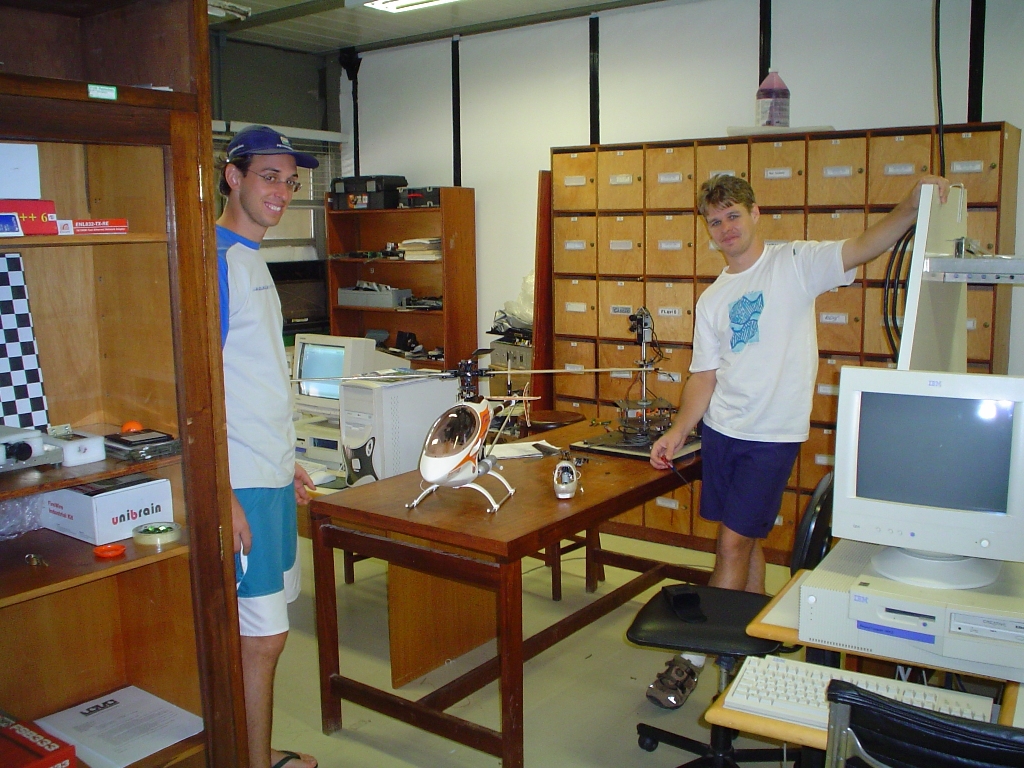
Setup do experimento de controle de
velocidade
Sensor de velocidade
Controle de velocidade
na partida
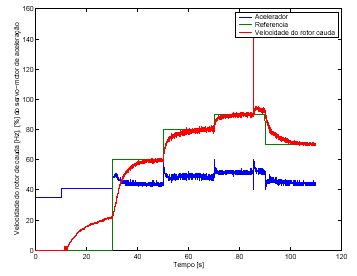
Resultados de avaliação
de vários reguladores de velocidade
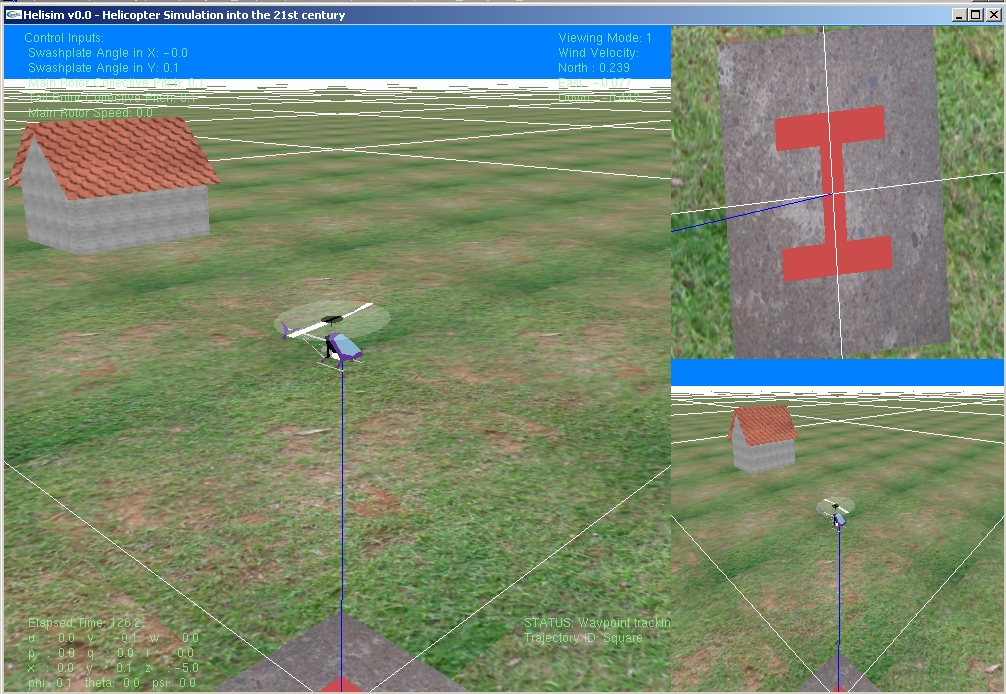
Simulador
na versão Windows/OpenGL - Pedro Paim
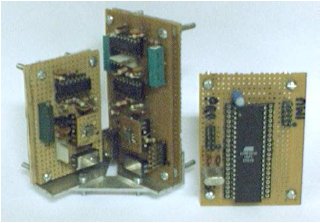
Unidade de
Medição Inercial (IMU) - Maurilio e Antônio
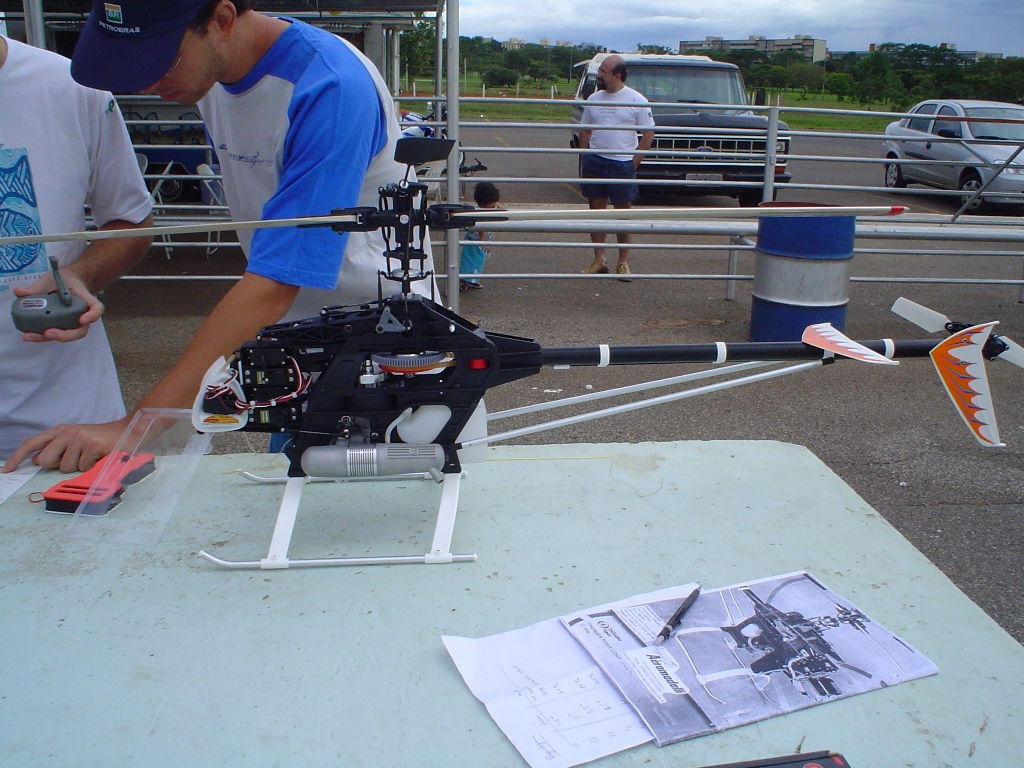
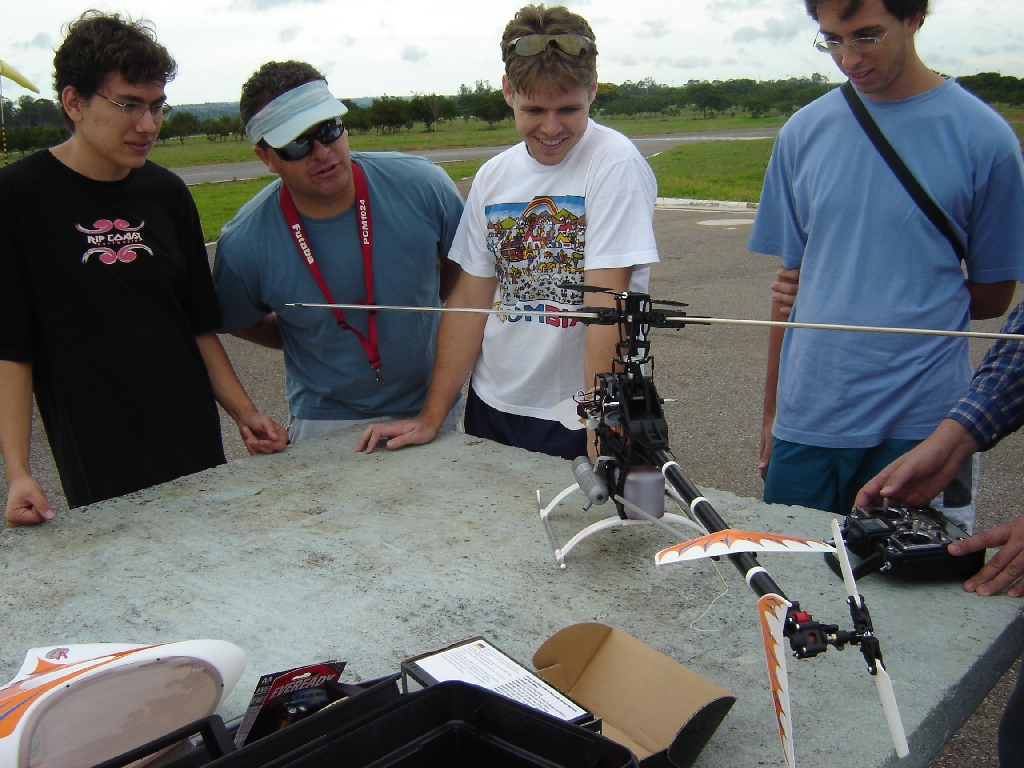
Novembro/Dezembro
2004 : teste de vôo do helimodelo no clube de
aeromodelismo de Brasília.
Vídeos:
(abril/2006) Identificação
e regulagem automática de velocidade do rotor
principal: