Geovany Araújo Borges, D.Sc.
Professor Adjunto - Departamento de Engenharia Elétrica - UnB
Principal
|
Disciplinas
|
Pesquisa
|
Publicações
|
Orientações
|
Recursos Técnicos
|
Contato
English
Robótica
Visão Computacional
Sistemas de Controle
Modelagem Estocástica
Robótica Aérea
Sistemas de localização 3-D para robótica aérea
(início do projeto: agosto de 2005)
Equipe
:
Geovany Araújo Borges
Ex-participantes
:
Antônio Padilha Lanari Bo (mestrado Eng. Elétrica)
Objetivo
: estudo e desenvolvimento de sistema de localização 3-D para uso em robótica aérea.
Documentos
:
Antônio Padilha Lanari Bo, "
Desenvolvimento de um sistema de localização 3D para aplicação em robôs aéreos
", Dissertação de mestrado em Engenharia Elétrica, Departamento de Eng. Elétrica, Universidade de Brasília, 2007.
Fotos
:
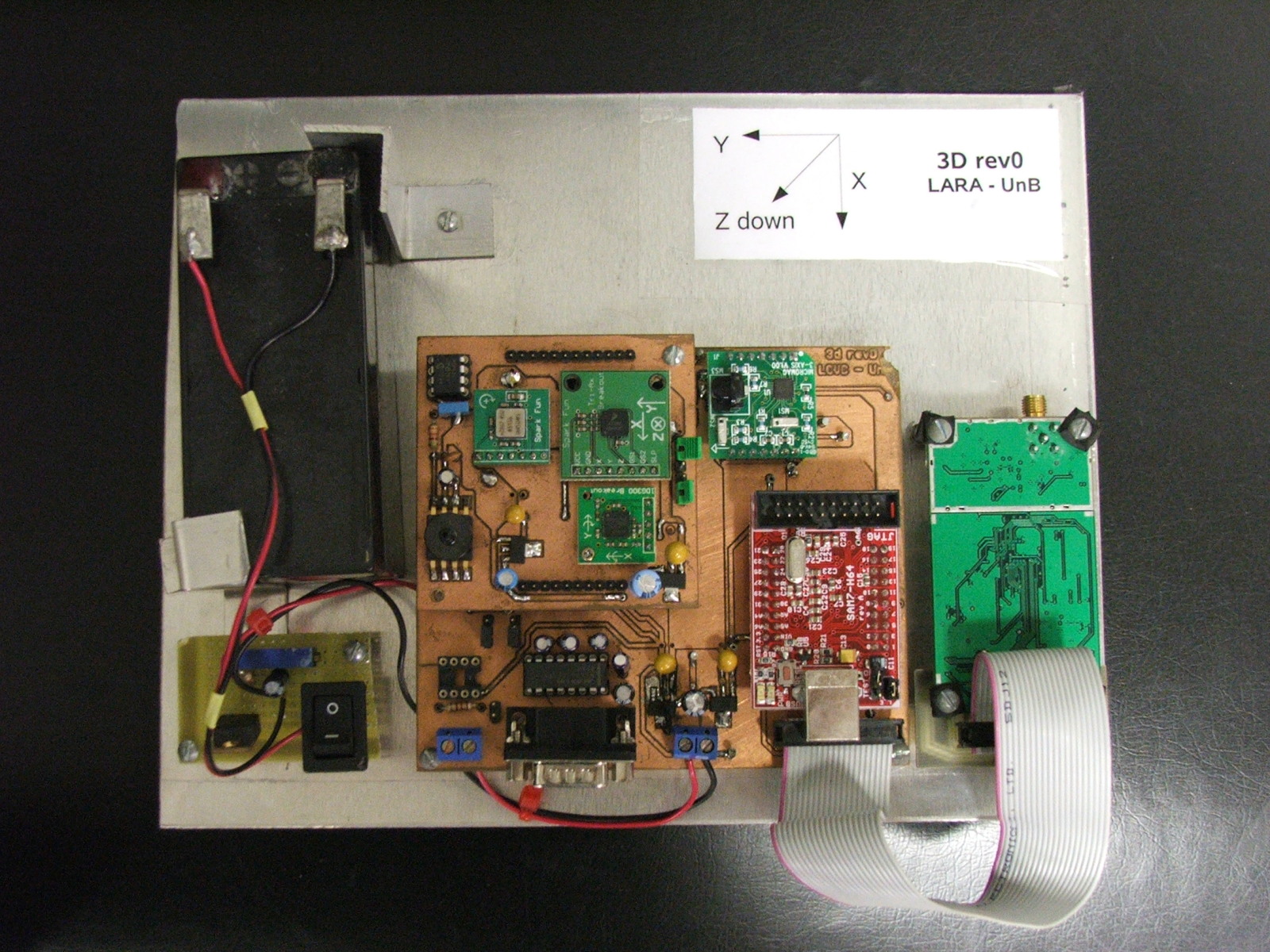
Sistema desenvolvido
na dissertação do
Antônio Padilha
(a)
Sistema embarcado desenvolvido com arquitetura ARM7
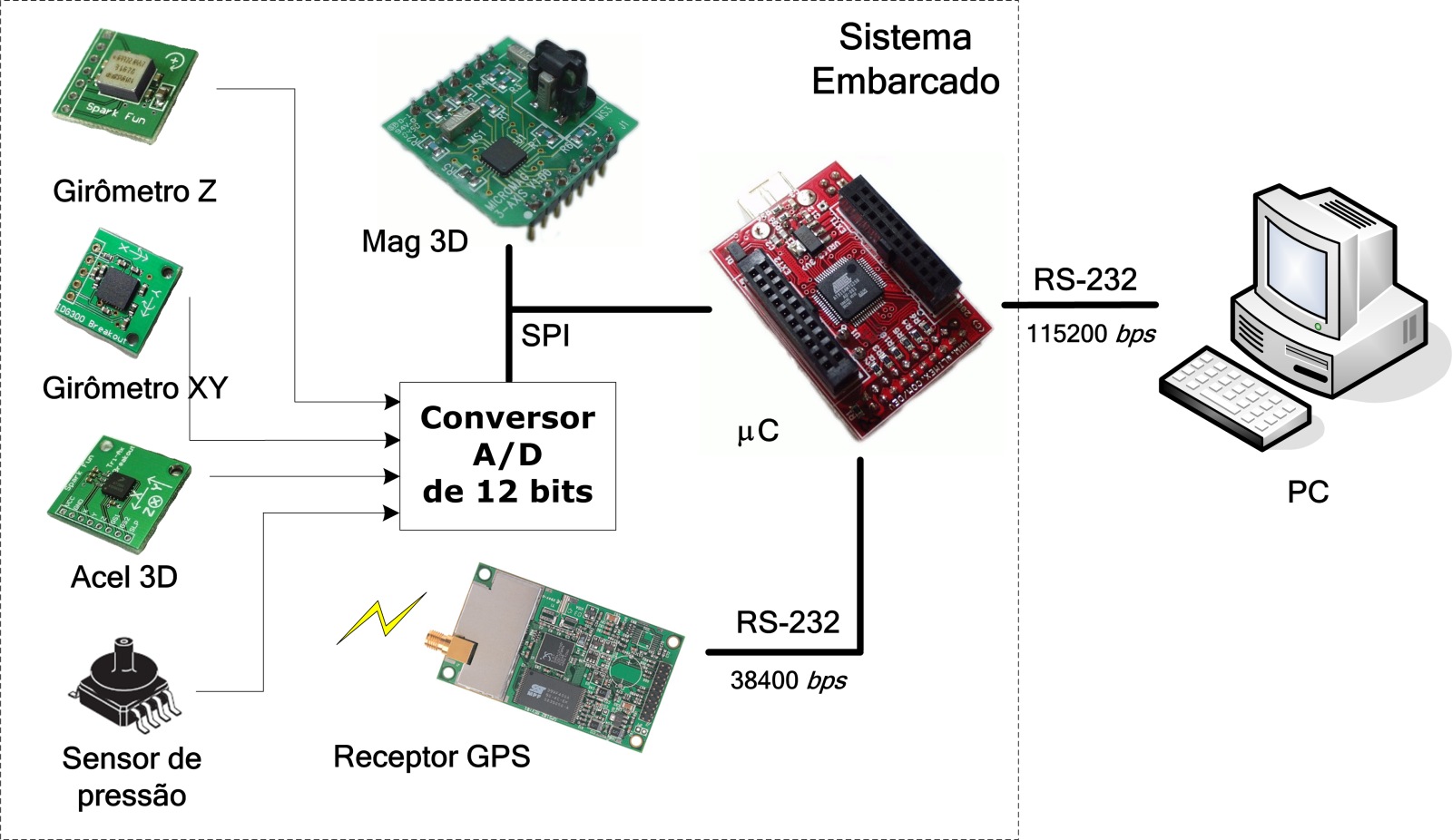
(b)
Arquitetura do sistema
Vídeos
:
Vídeo de baixa resolução que demonstra a estimação de atitude
.
Publicações
:
BO, Antonio Padilha Lanari ; BORGES, Geovany Araujo.
Denvolvimento de um sistema de localização 3D para aplicação em robôs aéreos
. In: V Simpósio Brasileiro de Engenharia Inercial (SBEIN 2007), 2007, Rio de Janeiro. p. 1-6.
TOPO