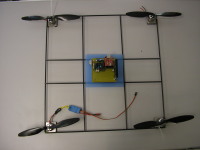
Objetivo: desenvolvimento
de um robô aéreo baseado em uma estrutura com
quatro rotores (quadrotor).
Atividades:
Desenvolvimento da estrutura mecânica.
Desenvolvimento dos sistemas eletrônicos de
controle
Integração de uma central inercial,
magnetômetro e sonar
Projeto de um controlador para estabilização
Documentos:
Pedro Henrique de Rodrigues Quemel e
Assis Santana, Marcelo Antunes Braga, "Concepção
de um veículo aéreo não-tripulado
do tipo quadrirrotor", Relatório de
trabalho conclusão de curso de graduação
em Eng. Mecatrônica, julho 2008. (PDF)