Sinara Augusta Borges
Campos (voluntária, Eng. Mecatrônica).
Felipe Pereira (voluntário,
Eng. Mecatrônica, atividades encerradas).
Objetivo: Estudo
de técnicas de cooperação multi-robôs
para auxílio à navegação.
Atividades: Implementação
de robôs móveis, com diferentes capacidades
de motrizes e sensoriais; investigação de
técnicas de navegação de dois robôs
por cooperação.
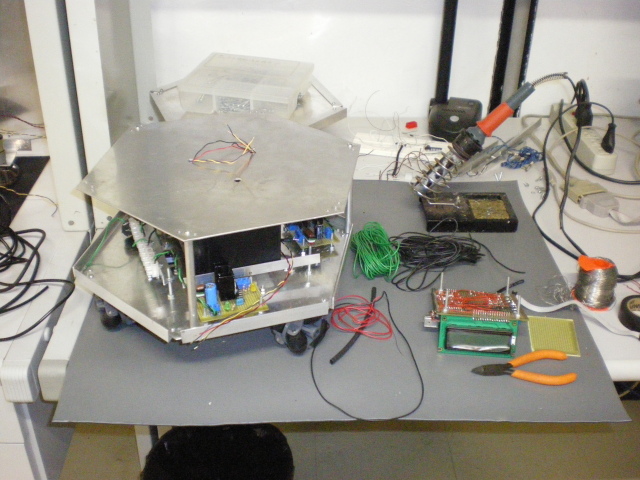
Fotos:
Bancadas
de desenvolvimento (maio, 2008)
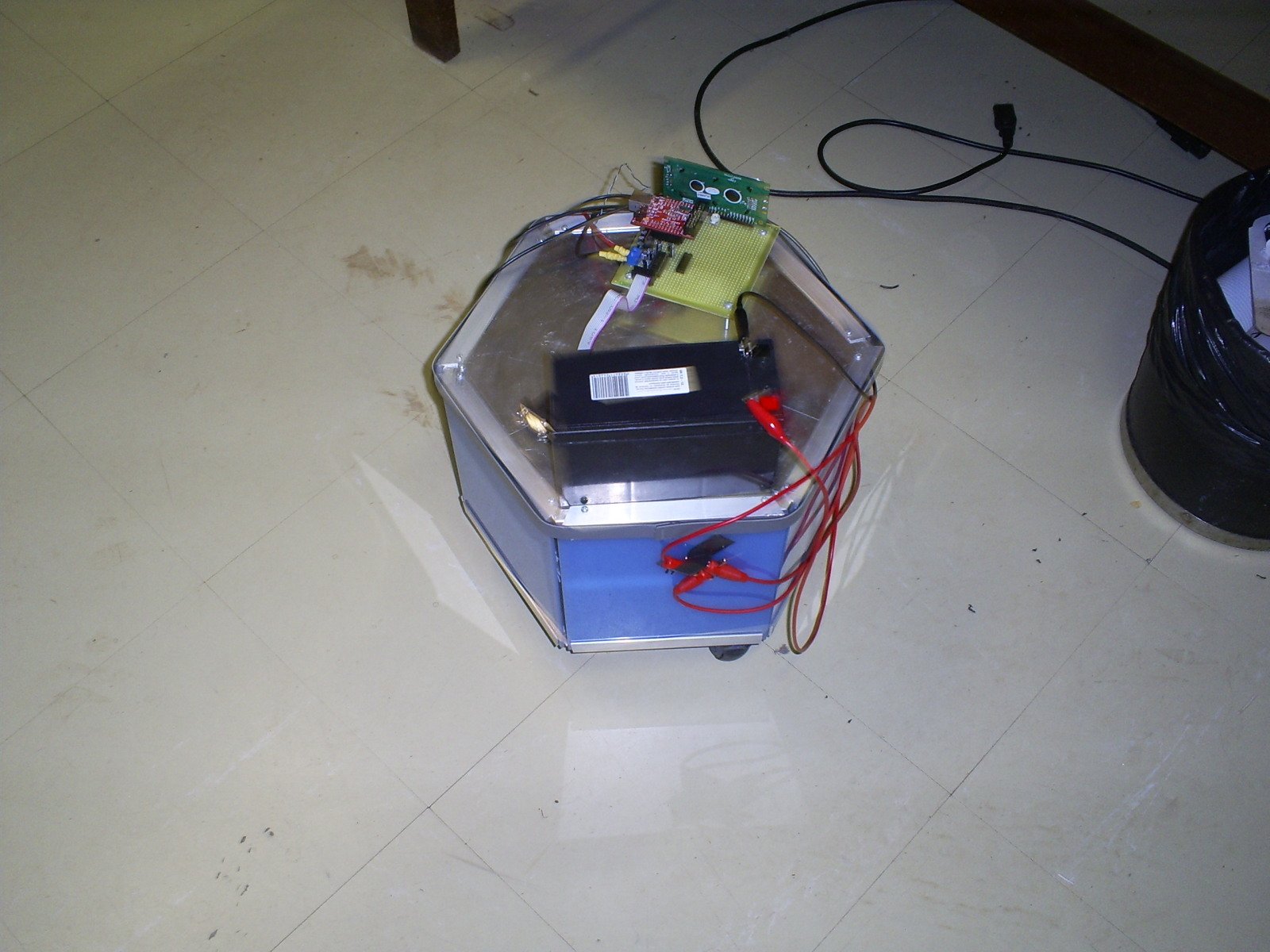
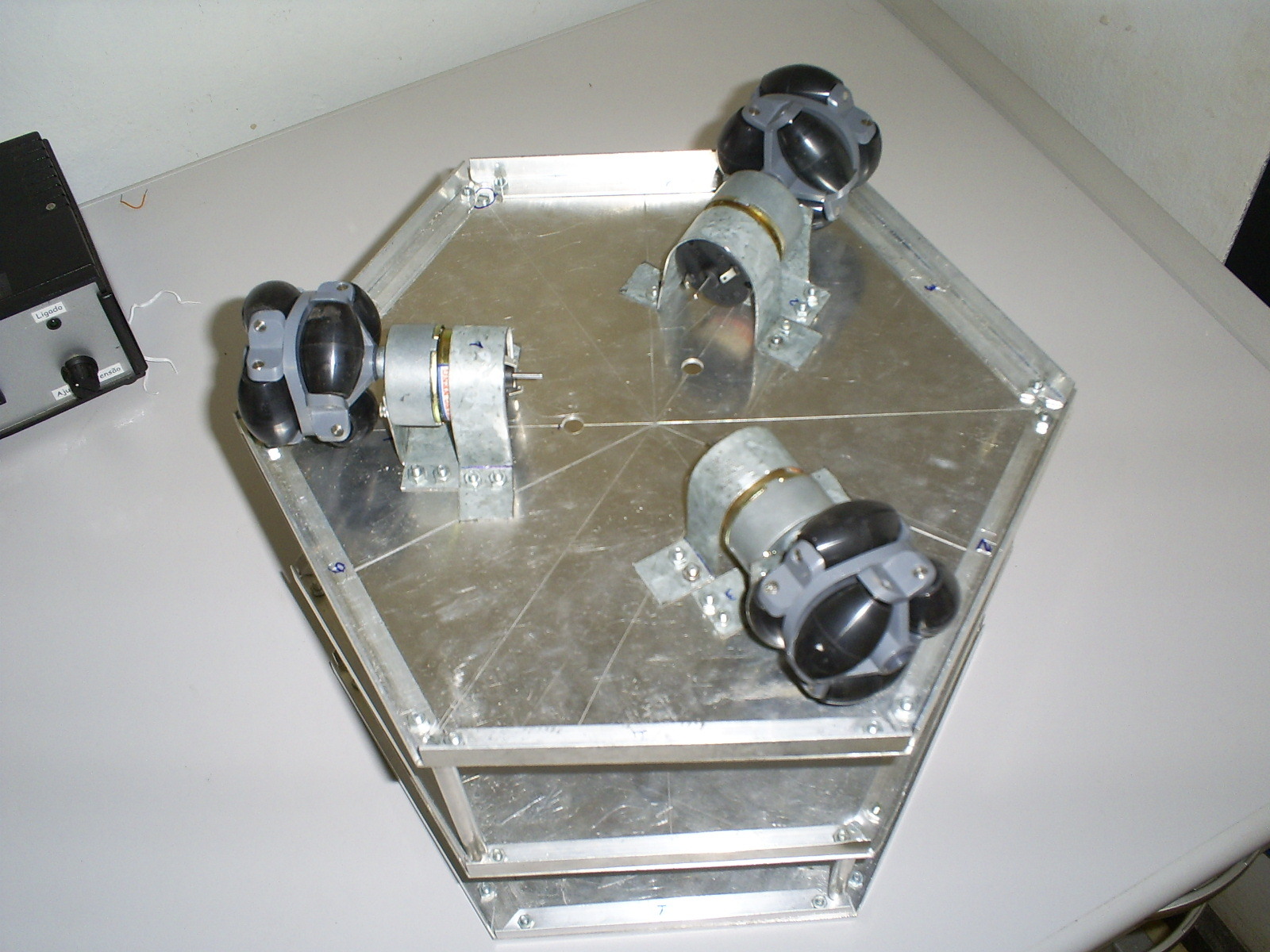
Ensaio
de movimento do robô omnidirecional (novembro,
2007)