Geovany Araújo Borges, D.Sc.
Professor Adjunto - Departamento de Engenharia Elétrica - UnB
Principal
|
Disciplinas
|
Pesquisa
|
Publicações
|
Orientações
|
Recursos Técnicos
|
Contato
English
Robótica
Visão Computacional
Sistemas de Controle
Modelagem Estocástica
Robótica Móvel
Controle de movimento de um robô humanóide sobre patins
(início do projeto: fevereiro de 2008)
Equipe
:
Prof. Geovany Araújo Borges
Felipe Brandão Cavalcanti (graduação Eng. Elétrica, bolsista de iniciação científica do CNPq)
Objetivo
: instrumentação e desenvolvimento de técnicas de controle de movimento para um robô humanóide sobre patins.
Atividades
:
Montagem de um robô humanóide Bioloid sobre patins.
Instrumentação com sensores inerciais.
Modelagem cinemática e dinâmica.
Estudo sobre a manutaneção automática de equilíbrio
Desenvolvimento de técnicas de controle de movimento com manutenção de equilíbrio
Fotos
:
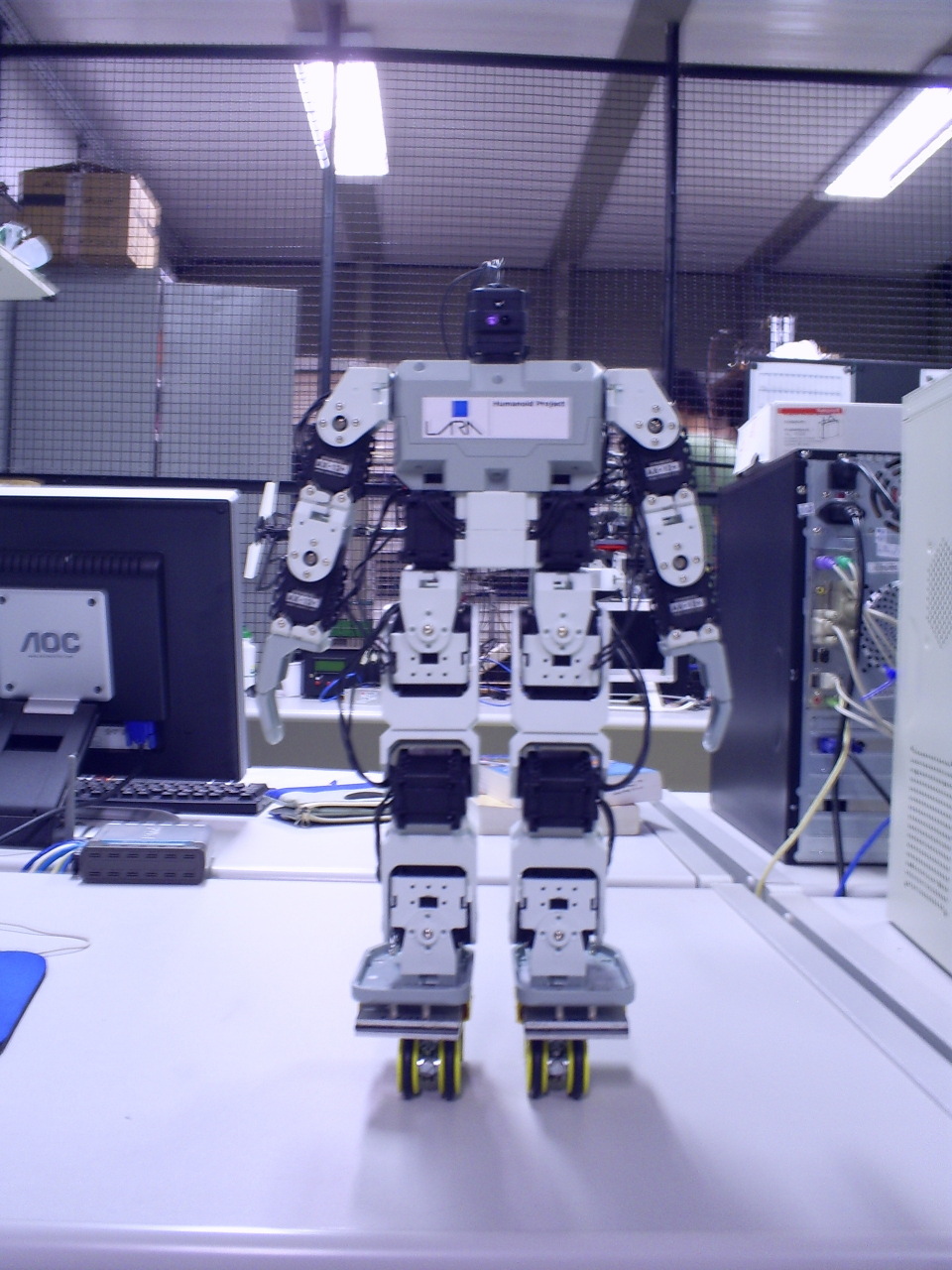
Evolução do projeto
Fevereiro 2008: humanóide sobre patins
Vídeos
:
Publicações
: