|
|
|
Robótica
Móvel
Planejamento
probabilístico de rotas
(início do
projeto: março de 2005)
- Equipe:
- Geovany Araújo Borges
- Bruno Vilhena Adôrno
(mestrando Eng. Elétrica).
- Objetivo: estudo e implementação
de técnicas de planejamento probabilístico
de rotas.
- Atividades: Estudo de técnicas
de amostragem para uso com mapas de rotas probabilístico.
- Publicações:
- B.V. Adorno, G.A. Borges, "Planejamento
de caminho usando BI-ARW melhorado e mapa de rotas",
VIII SIMPÓSIO BRASILEIRO DE AUTOMAÇÃO
INTELIGENTE (SBAI 2007), Florianopolis. 2007. pp. 1-6.
- B. V. Adôrno, C. S. R. Aguiar,
G. A. Borges, "PLANEJAMENTO DE TRAJETÓRIA
PARA O ROBÔ OMNI UTILIZANDO O ALGORITMO MAPA DE
ROTAS PROBABILÍSTICO", VII SIMPÓSIO
BRASILEIRO DE AUTOMAÇÃO INTELIGENTE /
II IEEE LATIN-AMERICAN ROBOTICS SYMPOSIUM, 2005, São
Luís. 2005. pp. 1-8. (PDF)
|
Imagens
|
|
|
|
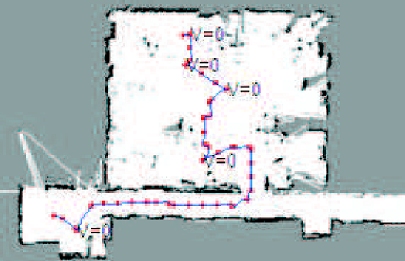
Trajetória gerada
em uma grade de ocupação de ambiente real
|
| |
|
|
|
Simulação
de técnica de geração Gaussiana
|
|
Vídeos
|
|
|
|
Planejamento em L
|
| |
|
|
|
Planejamento em U (caso
1)
|
| |
|
|
|
Planejamento em U (caso
2)
|
| |
|
|
|
Planejamento em U (caso
3)
|
TOPO
|
|
|