Bruno Vilhena Adôrno
(M.Sc. student, Electrical Eng.).
Goals: implementation of probabilistic
path planning techniques.
Activities: evaluation
of local sampling techniques for use with PRM.
Publications:
B.V. Adorno, G.A. Borges, "Planejamento
de caminho usando BI-ARW melhorado e mapa de rotas",
VIII SIMPÓSIO BRASILEIRO DE AUTOMAÇÃO
INTELIGENTE (SBAI 2007), Florianopolis. 2007. pp. 1-6.
B. V. Adôrno, C. S. R. Aguiar,
G. A. Borges, "PLANEJAMENTO DE TRAJETÓRIA
PARA O ROBÔ OMNI UTILIZANDO O ALGORITMO MAPA DE
ROTAS PROBABILÍSTICO", VII SIMPÓSIO
BRASILEIRO DE AUTOMAÇÃO INTELIGENTE /
II IEEE LATIN-AMERICAN ROBOTICS SYMPOSIUM, 2005, São
Luís. 2005. p. 1-8. (PDF)
(in brazilian portuguese)
Images
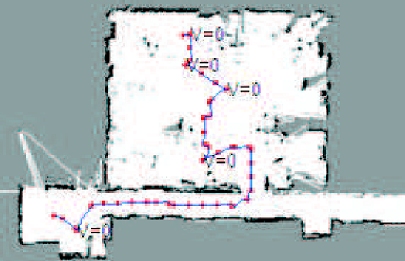
Path generated for a real occupancy
grid map
Gaussian sampling techinique applied
to a simulated environment