|
|
|
Robótica
Móvel
Sensor
óptico para reconhecimento de trajetórias
(período do
projeto: março de 1997 a junho de 1998)
- Equipe:
- Geovany Araújo Borges
- Antônio Marcus Nogueira Lima (DEE, UFCG)
- Gurdip Singh
Deep (DEE, UFCG).
- Objetivo: Implementação
de um sensor óptico de baixo custo para reconhecimento
de trajetórias para veículos automáticos.
- Atividades: Implementação
do sensor e plataforma de calibração.
|
Imagens
|
|
|
|
|
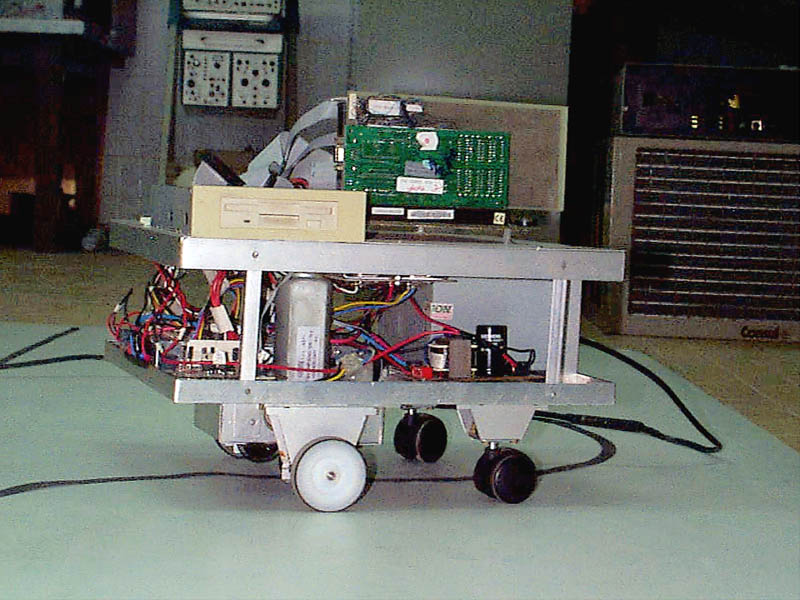
AGV Vista 1
|
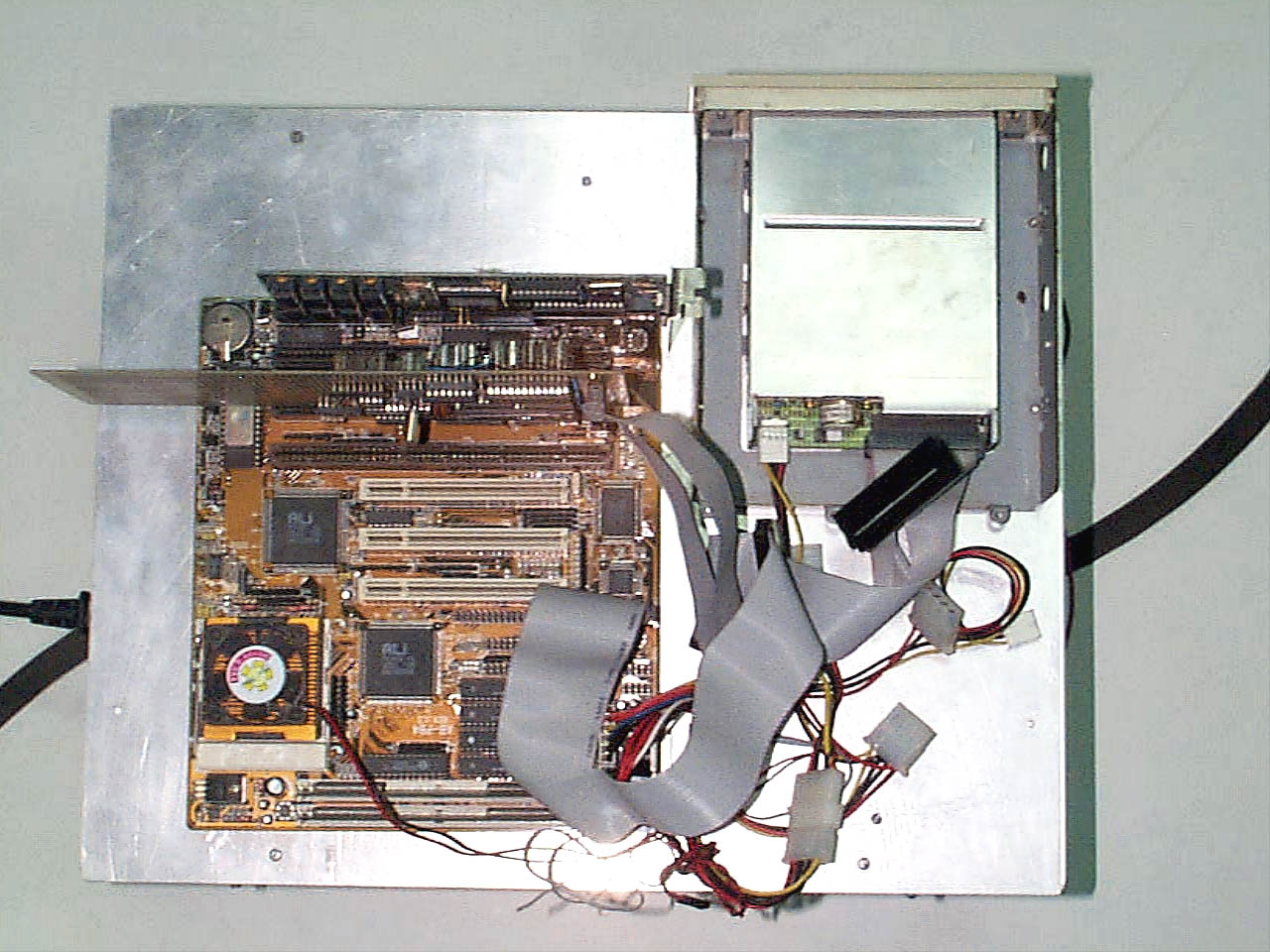
AGV Vista 2
|
| |
|
|
|
|
|
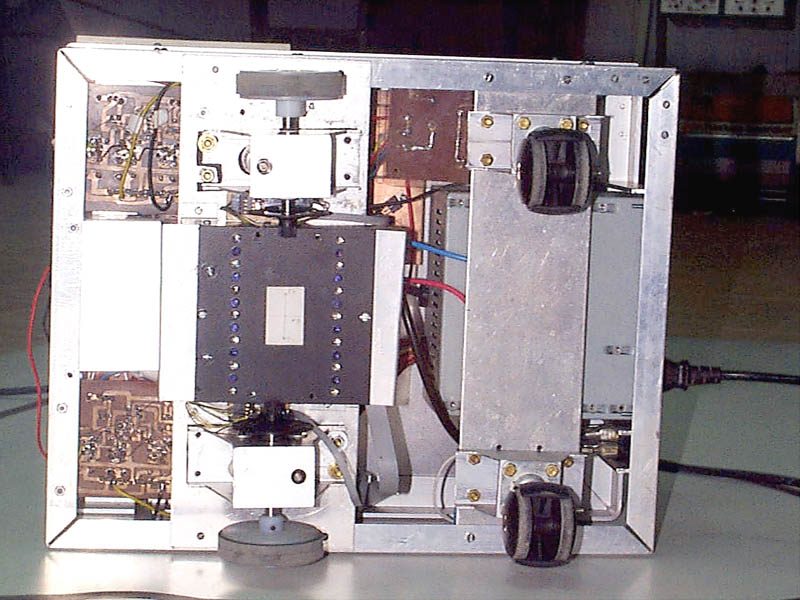
AGV Vista 3
|
AGV Vista 4
|
| |
|
|
|
|
|
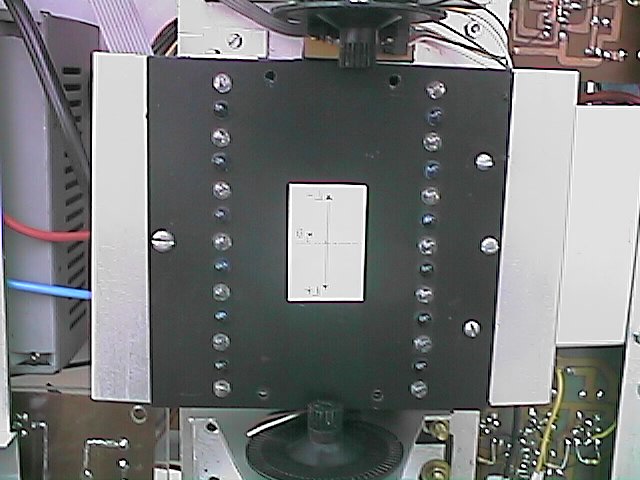
AGV Vista 5
|
Sensor óptico
|
- Publicações:
- G. A. Borges, "Um Sistema
Óptico de Reconhecimento de Trajetórias para Veículos
Automáticos", Copele, DEE/UFPB, Campina
Grande, Paraíba, Brazil, 1998 (in portuguese). Orientador:
Antonio Marcus Nogueira Lima (PDF)
- G. A. Borges, A. M. N. Lima and G. S.
Deep, "Characterization of a Trajectory
Recognition Optical Sensor for an Automated Guided Vehicle",
in IEEE Transactions on Instrumentation and Measurement,
vol. 49, n. 04, pp. 813-819, august 2000.
- G. A. Borges, A. M. N. Lima and G. S.
Deep, "Characterization of a Neural Network-Based
Trajectory Recognition Optical Sensor for an Autonomous
Vehicle". In Proceedings of IEEE International
Conference on Instrumentation and Measurement (IMTC),
may 18-20, Minessota, USA, 1998. (PDF)
|
|
|