|
|
|
Rehabilitation
Robotics
Robotic
prosthesis for above knee amputees
(since july 2004)
- Members:
- Geovany Araújo Borges
- Adson Ferreira
da Rocha
- João
Luiz Carvalho
- Suélia
Rodrigues Fleury Rosa
- Francisco
Assis de Oliveira Nascimento
- Alberto
López Delis (D.Sc.
student, Electrical Eng.)
- Augusto Cesar Coelho Felix (B.Sc.
student, Mechatronics Eng.,
concluded)
- Henrique Augusto Silva Vasconcellos
(B.Sc.
student, Mechatronics Eng.,
concluded)
- Davi Anders Brasil (B.Sc.
student, Mechatronics Eng.,
concluded)
- Glauco Scandaroli (B.Sc.
student, Mechatronics Eng.,
concluded)
- Eduardo Alves (B.Sc.
student, Mechatronics Eng.,
concluded)
- Renan Utida (B.Sc.
student, Electrical Eng.,
concluded)
- Ener Beckmann (B.Sc.
student, Mechatronics Eng.,
concluded)
- Gabriel Freitas (B.Sc.
student, Mechatronics Eng.,
concluded)
- Carlos Alberto Cascão
Júnior (B.Sc.
student, Mechatronics Eng.,
concluded)
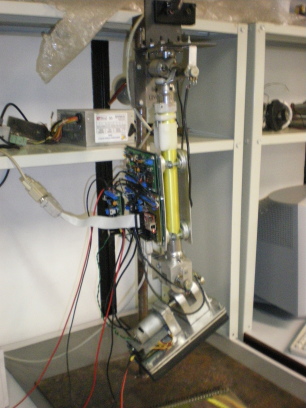
- Goals: Development of an active three
degrees of freedom robotic prosthesis for above knee amputeees.
- Activities: Mechanical
design of a three degrees of freedom prosthesis, automatic
motion intention estimation from EMG signal processing,
joint control, estimation of foot configuration with respect
to ground, stochastic model for motion phase classification.
|
Photos
|
|
|
|
May 2008: with joint control electronics
|
|
|
|
|
|
July 2007: new Ottobock's mechanical
structure
|
|
|
|
|
|
May 2005: first mechanical version
|
|
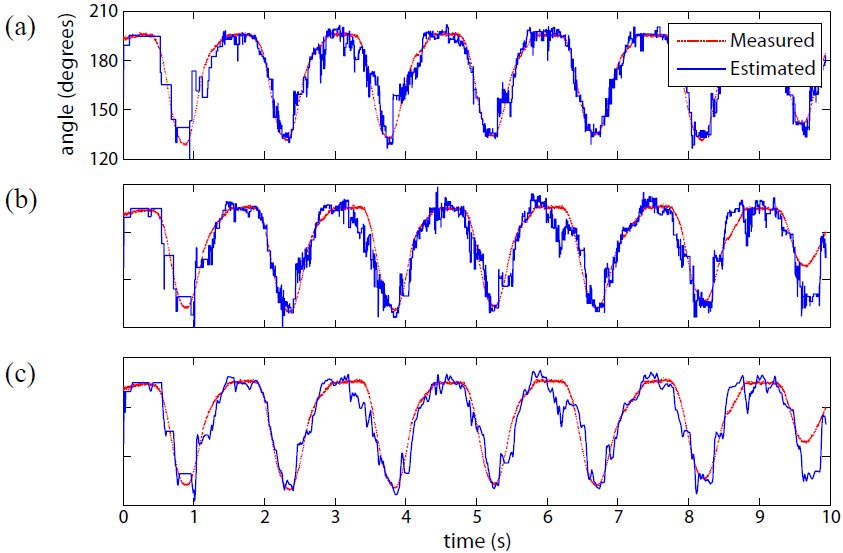
EMG motion
intention estimation - Alberto Delis
|
|
|
|
Traning and validation
data for knee angle estimation from EMG signais
|
- Videos:
- Documents:
- Alberto López Delis, "Processamento
de sinais de EMG para prótese robótica
de perna", PhD thesis in Elecgtrical Engineering,
march 2010. (PDF).
- Augusto Cesar Coelho Felix e Henrique
Augusto Silva Vasconcellos, "Interpretação
de sinais de EMG para joelho de prótese robótica",
B.Sc. conclusion report in Mechatronics Eng., dec. 2008.
(PDF).
- Davi Anders Brasil, "Controle de
orientação do pé de uma prótese
robótica para amputados acima do joelho",
B.Sc. conclusion report in Mechatronics Eng., july 2008.
(PDF).
- Eduardo da Silva Alves, "Proposta
de um módulo sensorial para estimação
de postura com relação ao solo de uma
prótese robótica de perna", B.Sc.
conclusion report in Mechatronics Eng., july 2007. (PDF).
- Glauco Garcia Scandaroli, "Controle
adaptativo de juntas para uma prótese robótica
de perna", B.Sc. conclusion report in Mechatronics
Eng., july 2007. (PDF).
- Ener Diniz Beckman e Gabriel Freitas
dos Santos, "Desenvolvimento de Controladores de
Juntas para Prótese Robótica de Perna",
B.Sc. conclusion report in Mechatronics Eng., july 2006.
(PDF).
- Carlos Alberto Cascão Junior,
"Prótese Mecânica para Reabilitação
Robótica", B.Sc. conclusion report in Mechatronics
Eng., june 2005. (PDF).
- Publications:
- DELIS, Alberto López ; CARVALHO,
João Luiz Azevedo de ; ROCHA, Adson Ferreira
da ; NASCIMENTO, Francisco Assis de Oliveira ; BORGES,
Geovany Araujo . Development of a myoelectric controller
based on knee angle estimation. In: Second International
Conference on Biomedical Electronics and Devices (BIODEVICES),
2009, Porto. Procedings of the Second International
Conference on Biomedical Electronics and Devices, 2009.
v. 1. p. 97-103.
- SCANDAROLI, Glauco ; BORGES, Geovany
Araujo ; ROCHA, Adson Ferreira da ; NASCIMENTO, Francisco
Assis de Oliveira . Adaptive Knee Joint Control for
an Active Amputee Prosthesis. In: Latin American
Robotics Symposium, 2008, Salvador. Latin American Robotics
Symposium (LARS 2008), 2008. p. 1-6.
- DELIS, Alberto López ; ROCHA,
Adson Ferreira da ; CARVALHO, João Luiz Azevedo
de ; DOS SANTOS, Icaro ; SENE Jr, I.G. ; Borges, G.
A. . Development of a Microcontrolled Bioinstrumentation
System for Active Control of Leg Prostheses. In:
30th Annual International Conference of the IEEE Engineering
in Medicine and Biology Society, 2008, Vancouver. Proceedings
of the 30th Annual International Conference of the IEEE
Engineering in Medicine and Biology Society, 2008. v.
1. p. 2392-2396.
- DELIS, Alberto López ; ROCHA,
Adson Ferreira da ; CARVALHO, João Luiz Azevedo
de ; NASCIMENTO, Francisco Assis de Oliveira ; RODRIGUES,
Suélia de Siqueira ; BORGES, Geovany Araujo .
Sistema para Estimação de Intenção
de Movimento em Prótese de Perna. In: XXI
Congresso Brasileiro de Engenharia Biomédica,
2008, Savador. Anais do XXI Congresso Brasileiro de
Engenharia Biomédica, 2008. v. 1. p. 1-4.
- DELIS, Alberto López ; NASCIMENTO,
Francisco Assis de Oliveira ; CARVALHO, João
Luiz Azevedo de ; ROCHA, Adson Ferreira da ; Borges,
G. A. . Algoritmo de estimação do ângulo
do joelho para controle miolétrico. In: XXI
Congresso Brasileiro de Engenharia Biomédica,
2008, Salvador. Anais do XXI Congresso Brasileiro de
Engenharia Biomédica, 2008. v. 1. p. 1-4.
- RODRIGUES, Suélia de Siqueira
; FERREIRA, Renan Utida ; MARQUES JUNIOR, Maurílio
Fernandes ; BECKMANN, Ener Diniz ; SANTOS, Gabriel Freitas
dos ; BORGES, Geovany Araujo ; ISHIHARA, João
Yoshiyuki ; ROCHA, Adson Ferreira da . Estudo e Desenvolvimento
de uma Prótese Robótica de Perna comandada
por Sinais Eletromiográficos. In: IV Congresso
Iberdiscap (Red Iberoamericana de Tecnologías
de Apoyo a la Discapacidad), 2006, Vitória, 2006.
p. 1-6.
- CASCÃO JÚNIOR, Carlos
Alberto ; FERREIRA, Renan Utida ; BECKMANN, Ener Diniz
; BORGES, Geovany Araujo ; ISHIHARA, João Yoshiyuki
; ROCHA, Adson Ferreira da . Estudo e Desenvolvimento
de Uma Prótese Ativa de Perna Comandada por Sinais
Eletromiográficos. In: VII Simpósio
Brasileiro de Automação Inteligente /
II IEEE Latin-American Robotics Symposium, 2005, São
Luis, 2005. p. 1-8. (PDF)
- FERREIRA, Renan Utida ; ROCHA, Adson
Ferreira da ; CASCÃO JÚNIOR, Carlos Alberto
; BORGES, Geovany Araujo ; NASCIMENTO, Francisco Assis
Oliveira Nascimento ; VENEZIANO, Wilson Henrique . Reconhecimento
de Padrões de Sinais de EMG para Controle de
Prótese de Perna. In: XI Congresso Brasileiro
de Biomecânica, 2005, João Pessoa, 2005.
p. 1-5.(PDF)
|
|
|