|
|
|
Robótica
Móvel
Controle
de marcha para robôs quadrúpedes
(início do
projeto: julho de 2005)
- Equipe:
- Prof. Geovany Araújo Borges
- Prof. Alexandre Ricardo Soares Romariz
- Rafael Toscano (graduação
Eng. Mecatrônica,
atividades concluídas)
- Neverton Alves de Novais (graduação
Eng. Mecatrônica,
atividades concluídas)
- Rafael Fontes (graduação
Eng. Elétrica,
atividades concluídas)
- Igor Ferreira Cardoso (graduação
Eng. Elétrica,
atividades concluídas)
- Gauss Fernandes (graduação
Eng. Elétric,
atividades concluídasa)
- André du
Pin Calmon (graduação
Eng. Elétrica,
atividades concluídas)
- Nathalie Pinheiro
(graduação
Eng. Elétrica,
atividades concluídas)
- Renan Utida Ferreira
(graduação
Eng. Elétrica,
atividades concluídas)
- Gustavo Cotta (graduação
Eng. Mecatrônica,
atividades concluídas)
- Laurindo Neto (graduação
Eng. Mecatrônica,
atividades concluídas)
- Objetivo: estudo e desenvolvimento
de técnicas de controle de marcha para plataformas
quadrúpedes.
- Atividades:
- Desenvolvimento de uma plataforma quadrúpede.
- Modelagem cinemática e dinâmica
- Controle de locomoção
- Gerador de movimento sob restrição de
contato
- Aplicação de técnicas de aprendizagem
para a marcha
- Documentos:
- Neverton Alves de Novais, Rafael Alves
Toscano, "Estudo de locomoção
de uma plataforma quadrúpede utilizando sensoriamento
inercial e garação de padrões de
movimento", Relatório de trabalho conclusão
de curso de graduação em Eng. Mecatrônica,
dezembro 2007. (PDF)
- Gauss Fernandis Batista e Igor Ferreira
Cardoso, "Adequação de um sistema
de locomoção de um robô quadrúpede
para avaliação de algoritmos de aprendizagem",
Relatório de trabalho conclusão de curso
de graduação em Eng. Elétrica,
julho 2007. (PDF)
- Rafael Fontes Souto, "Modelagem
cinemática de um robô quadrúpede
e geração de seus movimentos usando filtragem
estocástica", Relatório de trabalho
conclusão de curso de graduação
em Eng. Elétrica, julho 2007. (PDF)
- André du Pin Calmon, Nathalie
Carvalho Pinheiro e Renan Utida Ferreira, "Desenvolvimento
de um robô-cachorro comportamental: percepção
e modelagem comportamental", Relatório
de trabalho conclusão de curso de graduação
em Eng. Elétrica, dezembro 2006. (PDF)
- Gustavo Henrique Cotta, Laurindo Raulino
Neto, "Realização de uma plataforma
para estudo de robótica comportamental baseada
em quadrúpedes", Relatório de
trabalho conclusão de curso de graduação
em Eng. Mecatrônica, dezembro 2006. (PDF)
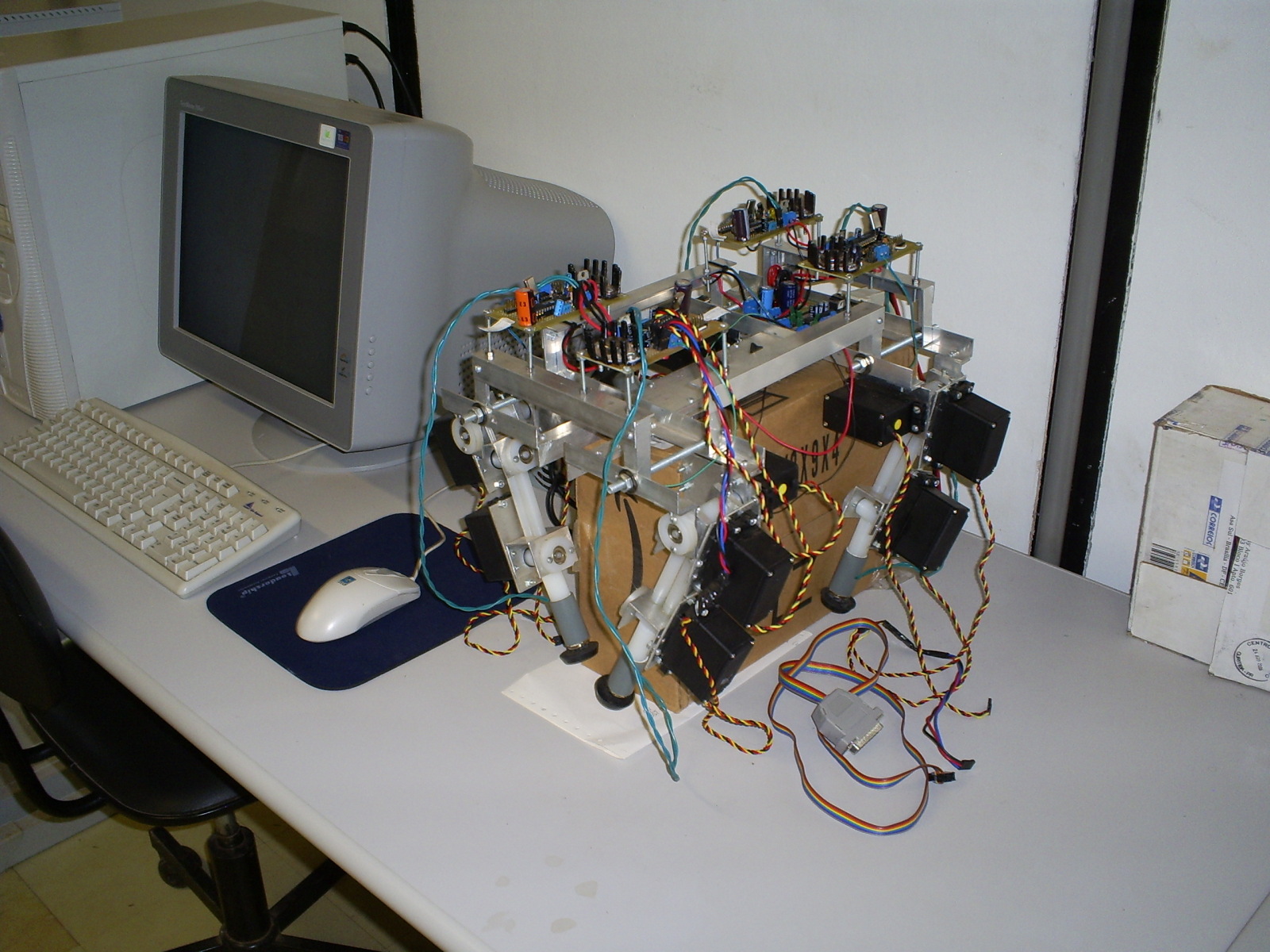
- Fotos:
|
Evolução
do projeto
|
|
|
|
Foto de dezembro de 2007
|
|
|
|
|
|
|
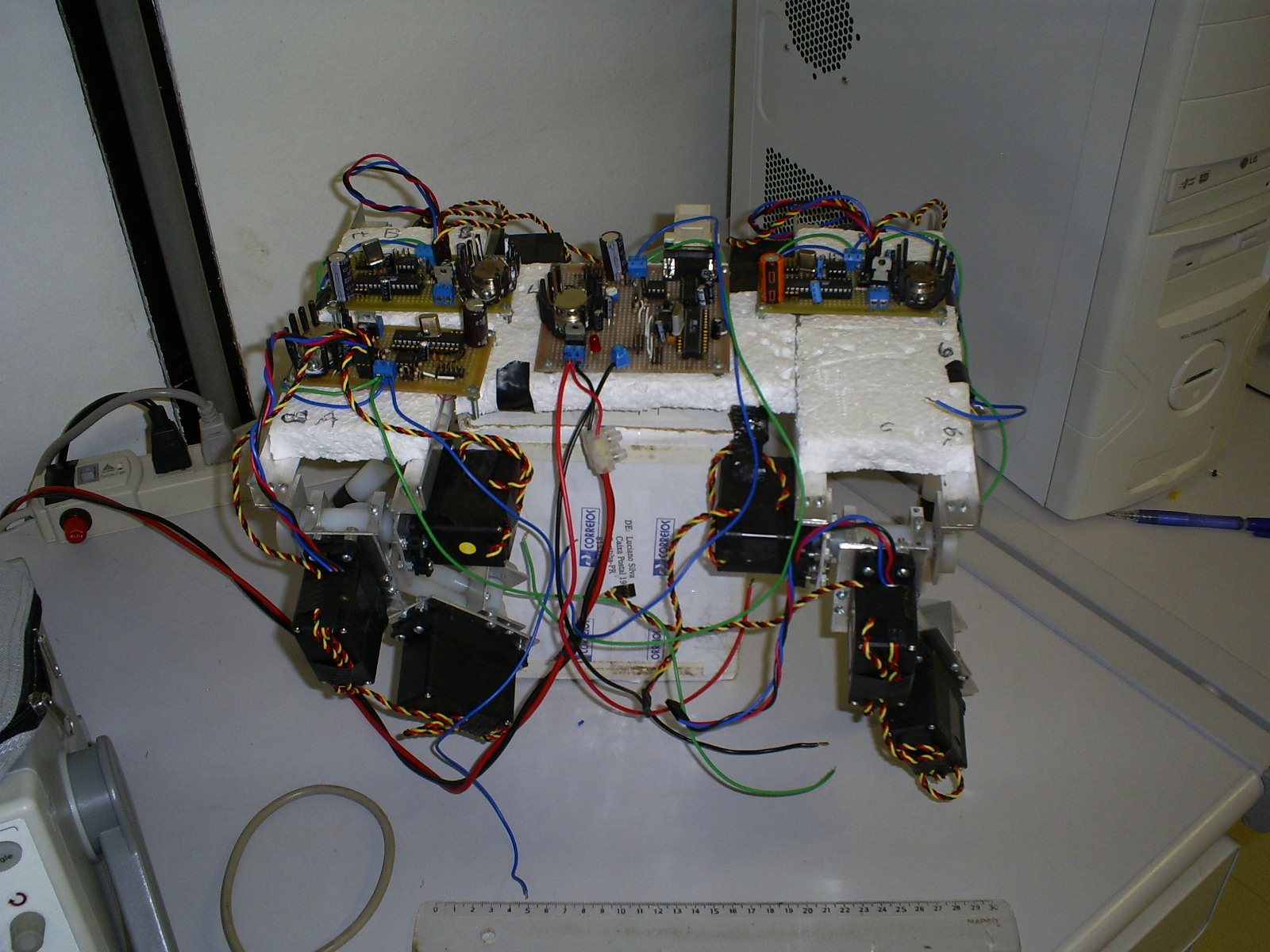
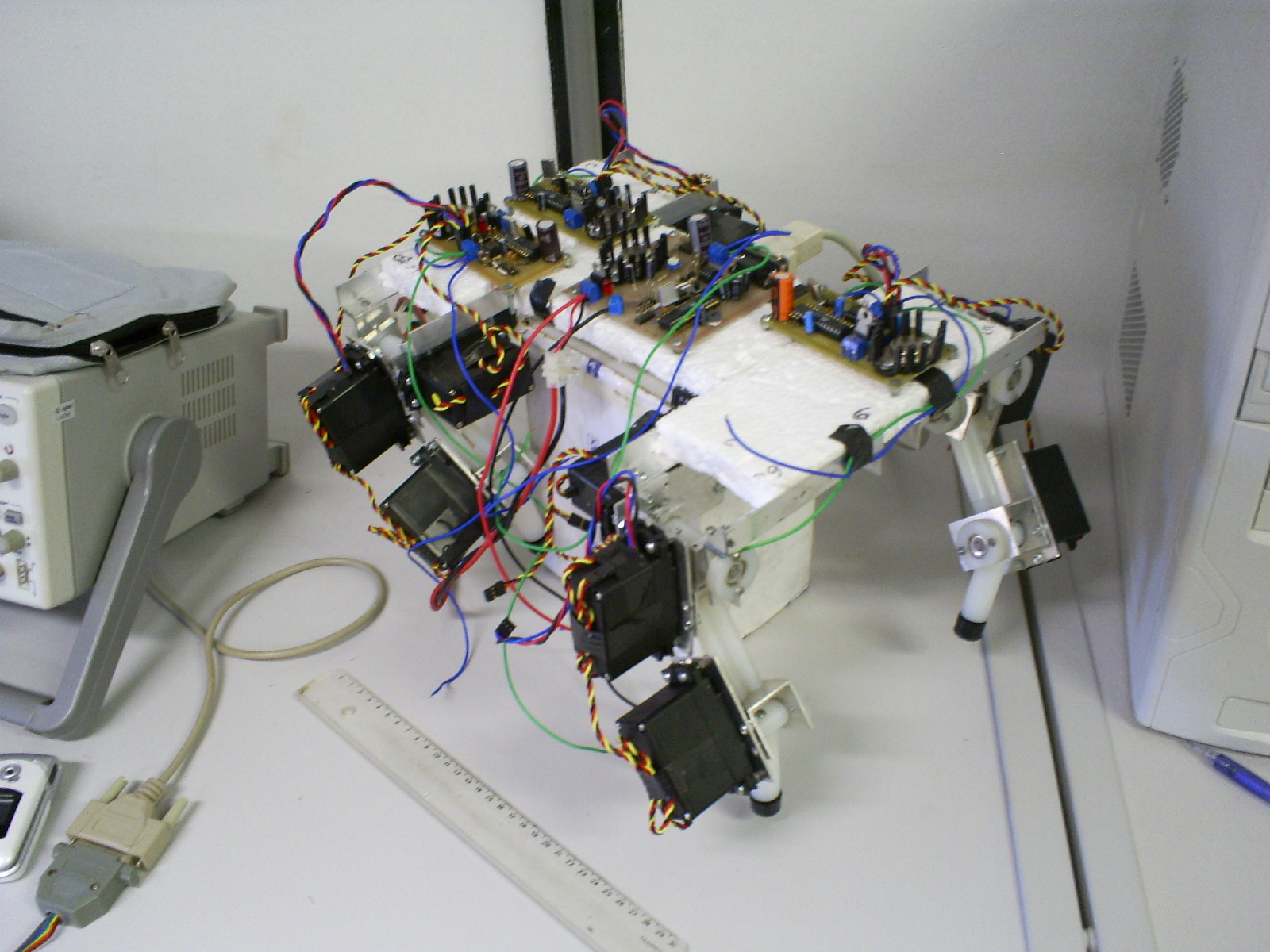
Fotos de julho de 2007
|
| |
|
|
|
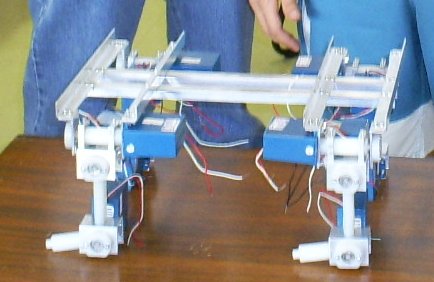
Foto de dezembro de 2006
|
- Vídeos:
- Vídeos de ensaio de trote (30/06/2007):
- Vídeos da segunda tentativa de marcha (25/04/2007):
- Vídeos da primeira tentativa de marcha (09/04/2007):
- Vídeo
de trabalho (29/03/2007)
- Publicações:
|
|
|