|
|
|
Robótica
Móvel
Cartografia
e localização simultâneos
(início do
projeto: setembro de 1998)
- Pesquisadores:
- Geovany Araújo Borges
- Eduardo
Alves (mestrado Eng. Elétrica).
- Glauco Garcia
Scandaroli (mestrado Eng.
Elétrica, concluído).
- Objetivos: Desenvolvimento
teórico e experimentação de técnicas
de cartografia (ou mapeamento) de ambientes artificiais
com localização simultânea.
- Atividades: Cartografia
estocástica com restrições, estimador
ótimo de posição.
|
Imagens
|
|
|
|
Robô Omni
|
| |
|
|
|
|
Robô Aramis
|
| |
|
|
|
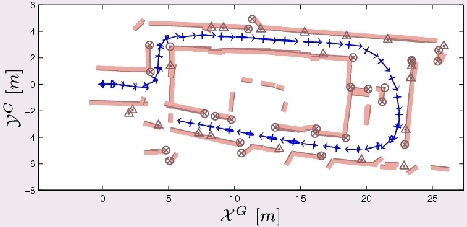
Mapa construído
usando técnicas tradicionais
|
| |
|
|
|
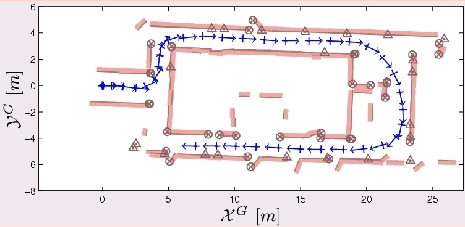
Mapa construído
usando o método proposto
|
- Vídeos:
- Documentos:
- Carla Silva Rocha
Aguiar, "Estudo da Plataforma Móvel Omni
e Calibração de Câmera para Localização
3-D", Relatório de trabalho conclusão
de curso de graduação em Eng. Mecatrônica,
abril 2006. (PDF).
- Alexandre Simões Martins
e Diogo Andrade, "Cinturão de ultra-som
para detecção de obstáculos para
o robô Omni", Relatório de trabalho
conclusão de curso de graduação
em Eng. Mecatrônica, janeiro 2005. (PDF).
- Publicações:
- G. A. Borges, "Cartographie
de l'environnement et localisation robuste pour la navigation
de robots mobiles", Département de Robotique,
LIRMM/CNRS/Université Montpellier II, Montpellier,
France, 2002 (in french). Orientadora: Marie-José
Aldon, (PDF)
- G. A. Borges and M.-J.
Aldon, "Line Extraction in 2D Range Images for
Mobile Robotics", in Journal of Intelligent &
Robotic Systems, v. 40, n. 3, pp. 267-297, 2004.
- G. A. Borges and
M.-J. Aldon, "Robust Estimators for Map-based
Mobile Robot Localization", Robotics And Autonomous
Systems, v. 45, n. 3,4, pp. 131-159, 2003 .
- BORGES, Geovany Araujo,
"Cartographie de l'environnement et localisation
robuste pour la navigation de robots mobiles".
in Rairo - Journal Européen des Systèmes
Automatisés (JESA), Paris, v. 37, n. 10, pp. 1299-1304,
2003.
- G. A. Borges and M.-J.
Aldon. "Optimal Mobile Robot Pose Estimation
Using Geometrical Maps ". in IEEE Transactions
on Robotics and Automation, vol. 18, n. 01, pp. 87-94,
february 2002.
- G. A. Borges, M.-J.
Aldon, "LOCAL MAP BUILDING FOR MOBILE ROBOTS BY
FUSING LASER RANGEFINDER AND MONOCULAR VIDEO IMAGES",
VII SIMPÓSIO BRASILEIRO DE AUTOMAÇÃO
INTELIGENTE / II IEEE LATIN-AMERICAN ROBOTICS SYMPOSIUM,
2005, São Luís. 2005. pp. 1-8. (PDF)
- G. A. Borges and M.-J.
Aldon."Environment Mapping and Robust Localization
for Mobile Robots Navigation in Indoor Environments".
In CONGRESSO BRASILEIRO DE AUTOMÁTICA, Gramado,
Brazil, 2004. (PDF)
- G. A. Borges and M.-J.
Aldon, "A Decoupled Approach for Simultaneous
Stochastic Mapping and Mobile Robot Localization".
In Proc. of 2002 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS 2002), september
30 - october 4, Lausanne, Switzerland, 2002. (PDF)
- G. A. Borges, M.-J.
Aldon. "Design of a Robust Real-Time Dynamic
Localization System for Mobile Robots".
In Proc. of 9th International Symposium on Intelligent
Robotic Systems (SIRS), Toulouse, France, 2001. (PDF)
- G. A. Borges, M.-J.
Aldon and T. Gil, "An Optimal Pose Estimator
for Map-based Mobile Robot Dynamic Localization: Experimental
Comparison with the EKF". In Proc. of IEEE
International Conference on Robotics and Automation (ICRA),
may 21-26, Seoul, Korea, 2001. (PDF)
- G. A. Borges and M.-J.
Aldon, "A Split-and-Merge Segmentation Algorithm
for Line Extraction in 2-D Range Images".
In Proc. of 15th International Conference on Pattern Recognition
(ICPR), september 3-8, Barcelona, Spain, 2000 (PDF)
- G. A. Borges and M.-J.
Aldon, "Motion Estimation by Iterative 2-D
Features Matching in Range Images". In Proc.
of IEEE International Conference on Robotics and Automation
(ICRA), april 22-28, San Francisco, California, USA, 2000.
(PDF)
- G. A. Borges, M.-J.
Aldon and O. Strauss, "Estimation de Mouvement
par Appariement de Droites 2-D dans des Images de Distance".
In Proc. of 12ème Congrès Francophone AFRIF-AFIA de Reconnaissance
des Formes et Intelligence Artificielle (RFIA), february
1-3, Paris, France, 2000 (in french). (PDF)
|
|
|