Humanoid
UnBeatables goes to Robocup 2016
10/08/16 09:46 Filed in: News
For the third consecutive time, UnBeatables has won the MVP award at the Drop-in Only category at Robocup SPL. The competition has taken place in Leipzig, Germany. Congratulations to all the team!
UnBeatables wins MVP at Robocup 2015
01/08/15 09:12 Filed in: News
UnBeatables application for RoboCup 2014
14/03/14 17:02 Filed in: Videos
Team UnBeatables was established early this year to compete at Robocup Standard Platform League (SPL). The competition involves teams of NAO robots playing soccer. This is our application video. We are thrilled to take part in the Drop-in Player competition! For more info check our Facebook page.
Human-Robot Interaction in the news
09/02/12 16:46 Filed in: News
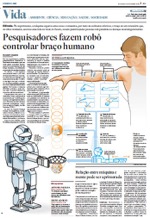
Our work on human-robot interaction presented on IROS 2011 was depicted in the online version of IEEE Spectrum and in the Brazilian newspaper Estado de São Paulo. It was a collaborative work between Bruno V. Adorno, Philippe Fraisse, and myself. Below you may access both articles.

Human-robot colaboration: first tests with HOAP3
05/08/10 12:28 Filed in: Videos
Some results obtained in a human-robot colaboration experiment. All tasks were executed using the cooperative dual task-space framework proposed by Bruno Adorno and Philippe Fraisse. The setup included a HOAP3 humanoid robot, an easyTrack 500 optical tracking system, and real-time visualization.
Towards a cooperative framework for interactive manipulation involving a human and a humanoid
05/04/11 17:26 Filed in: Videos
This is the video accompanying the paper entitled "Towards a Cooperative Framework for Interactive Manipulation Involving a Human and a Humanoid" (ICRA2011).
In the paper, the interaction is represented by means of the relative configuration between the human's and the robot's hands. Based on this principle and a set of mathematical tools also proposed in the paper, a large set of tasks can be represented intuitively. The concept of simultaneous handling using mirrored movements, where the human controls the robot and simultaneously interacts with it by means of a common manipulated object, is also introduced.
In the paper, the interaction is represented by means of the relative configuration between the human's and the robot's hands. Based on this principle and a set of mathematical tools also proposed in the paper, a large set of tasks can be represented intuitively. The concept of simultaneous handling using mirrored movements, where the human controls the robot and simultaneously interacts with it by means of a common manipulated object, is also introduced.